© 2013 Oceanic Imaging Consultants, Inc.

Service + Software for Seafloor Mapping

Commercial aspects of sonar were quickly applied to the research (and drove it in many cases). Today, oil companies and geological surveyors record the echo profiles from towed hydrophone arrays in search of petroleum in the Gulf of Mexico and elsewhere with seismic sources (air guns, water guns, sparkers, explosives or other means); a method called seismic profiling. On the less costly and dangerous end, most research boats these days are equipped with 3.5Khz sub-bottom profilers which have a fairly wide beam (12-30 degrees) but good penetration (usually measured in fractions of a second, since we don't know the velocity of what we're penetrating). Alternatively, if better bathymetric profiles are required a higher frequency depth precision depth recorder, also known as a narrow beam sounder is required (at the expense of less penetration). These often operate at 12 KHz or above and have a single beam 2-4 degrees wide. With a narrower beam, you may have greater confidence that the value you pick as the bottom (from the first echo return) is actually right beneath you, and not off to the side (side-swipe).
While being able to continuously gather bathymetric profiles was a great improvement from the archaic lead lining method, it still meant you only knew what was right beneath you. Anything off to the side was still an unknown. Naturally, the next approach was to point the beams of the sonar out to the side, creating fan shaped beams to port (left) and starboard (right) which mapped a broad bow-tie shaped piece of the seafloor with every ping.
MULTIBEAM
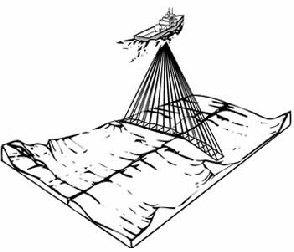
There are two main types of sonars - multibeam sonars for mapping bathymetry and sidescan sonars for mapping seafloor imagery. Multibeam bathymetric mapping systems are straightforward in that they consist of a source transducer designed to ensonify a broad region out to either side (say 60 degrees out to either side, but only one or two degrees along the ship's track). They also involve a receiver array (hydrophones) that, through the magic of phase delay techniques, manages to pre-form multiple adjacent beams focused at known angles. As each ‘beam’ listens for returns from only one angle, but every beam records the time of the returning echoes independently, each ping results in “n” pairs of range (travel time * speed of sound / 2) and angle, where “n” is the number of beams. Range and angle for each beam can be converted to cross-track distance and depth. String all the points together, and you have a bathymetric surface you can contour or play with in many other fashions. More recently, people have begun to realize that you could not only log the time of the echo in each beam, but the amplitude as well, in order to determine how reflective the bottom was, as well as its depth/shape.
Brief History of Sonar Development (page 2 of 4)
Figure 4. Geometry of a typical multibeam
sonar for mapping ocean bottom contours.